– 作者:Rod Machado
您准备好摇滚了吗?如果您认为着陆很有趣,等到您迷上飞行仪表着陆系统(ILS)进近时。我在概述中提到过它,但我们将在这里详细介绍,因为它是航空业最具挑战性却最令人满意的空中活动之一。
ILS进近包括使用垂直和水平电子引导下降到跑道。这是通过跟随您仪表板上ILS显示器中的两个指针(图2-1)来完成的。
 图2-1 |
与其他仪表进近不同,这种进近将您下降到一个被称为决断高度(DH)的高度。DH大约在跑道标高以上200英尺,如图2-2所示。
 图2-2 |
从这个不太高的位置,您向外瞥一眼,决定是否能看到跑道足够好以着陆(因此得名决断高度)。如果跑道能见度不佳,无法安全着陆,您应用动力,爬升,并前往其他天气更好的地方。让我们仔细看看ILS进近是如何构建的。
ILS由两个电子波束组成。一个波束向外倾斜,另一个从跑道综合体向上倾斜,如图2-3所示。
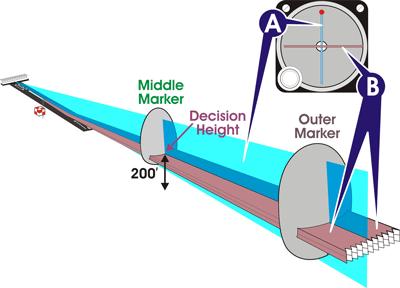 图2-3 |
向外(水平)的波束被称为航向道。它帮助将您的飞机与跑道对齐。您通过跟随图2-3中所示的指针(位置A)来跟踪航向道。如果指针在右侧,您向右移动;如果在左侧,您向左移动。保持居中的指针意味着您的飞机正在跟踪跑道中心线。在无风条件下,您只需飞行跑道航向即可保持航向道指针居中。如果有风,您需要做小的修正来补偿风漂。听起来很简单,但要完善这项技能确实需要练习。
下滑道是一个电子波束,以大约3度角向上倾斜(图2-3)。通过将下滑道指针居中,如图2-3所示(位置B),您正在飞行一条无障碍的路径下降到跑道。您如何保持下滑道指针居中?就像航向道指针一样,向它飞行。如果指针向上摆动,那么向上飞行;如果向下摆动,那么向下飞行。目标是保持特定的下降率,使飞机能够跟踪下滑道下降到DH。
恒定率下降
对于以90节飞行的典型ILS进近,需要500英尺/分钟(fpm)的下降率以保持在下滑道上。当然,如果您以更快的速度飞行进近,您必须增加下降率。下滑道角度和风是影响将下滑道指针居中所需精确下降率的两个因素。
假设您想以90节的恒定率500 fpm进行下降(这是您将用于飞行ILS进近的典型剖面)。您应该如何做到这一点?首先,您将通过将动力从当前设置减少到1,600转/分钟,让机头自然略微低头。然后,您将根据需要调整俯仰以保持500 fpm的下降率,并调整动力以保持90节的空速。是的,这是我们之前课程中使用的控制功能的逆转。以这种方式使用控制装置允许您精确控制ILS进近所需的下降率。
以下是序列应该看起来的样子。
- 调整动力以在平飞中保持90节。
90节的速度在平飞中需要大约6度机头向上的俯仰姿态。 - 将动力减少到1,600转/分钟,让机头自然前倾,并调整俯仰以保持500 fpm的下降率。
这在姿态指示器(AI)上需要大约3度机头向上的俯仰。 - 配平以保持此下降率的姿态。
- 做小的动力调整以保持90节。
(飞机有惯性,所以移动节流阀时可能需要几秒钟才能改变速度。耐心点)。
信不信由您,这正是您在截获下滑道时要做的。由于下滑道通常从下方截获,您将在90节时平飞,直到指针在ILS显示器中降低到中心位置(图2-4)。
 图2-4 |
一旦居中,您将动力减少到大约1,600转/分钟,调整俯仰,并为500 fpm的下降率配平飞机,保持90节。假设您与宇宙完美和谐,飞机将一直保持在下滑道上直到DH。但您知道让您的脉轮打结有多容易,所以您不能指望您的业力完美。因此,您需要对下降率做轻微的变化以保持下滑道指针居中。让我们来检查这个。
假设您在下滑道上方,必须增加下降率来截获它。如果您想将下降率从500改为700 fpm,您需要将飞机置于3度机头向下的俯仰姿态,如图2-5所示。
 图2-5 |
您需要减少动力以保持90节的空速。保持特定下降率的秘密不是追逐VSI指针。只需将飞机置于AI上的精确姿态,然后对操纵杆做小的压力变化来调整下降率。
假设您已经截获了下滑道,并想将下降率改回到500 fpm。通过将俯仰增加到3度机头向上并将动力增加到大约1600转/分钟来做到这一点。
现在假设您在下滑道下方,必须减少下降率来截获它。通过将机头置于水平俯仰姿态,将下降率从500改为300 fpm,如图2-6所示。
 图2-6 |
将动力增加到大约1,700转/分钟以保持90节。
记住,不要追逐VSI指针。在AI上做俯仰变化,然后对操纵杆做小的压力调整来微调VSI的指示。
径向扫描主要仪表
ILS进近不是小睡的地方。跟随ILS指针到决断高度是一项艰巨的任务。这就是为什么您永远不要离开三步仪表扫描的第2步。换句话说,您几乎将所有时间都花在径向扫描恒定率下降的主要仪表上。图2-7显示了ILS进近的主要仪表。
 图2-7 ILS进近的主要仪表。空速,动力的主要仪表;航向陀螺,坡度的主要仪表;垂直速度,俯仰的主要仪表。 |
VSI是俯仰的主要仪表;HI是坡度的主要仪表,AI是动力的主要仪表。这些仪表与ILS显示器一起进行径向扫描(但是,您不需要经常径向扫描空速指示器)。因此,当飞行ILS时,这三个仪表会持续进行径向扫描,偶尔包括其他仪表。事情太忙了,无法执行三步扫描最后一步中发现的监控扫描。
此外,并非所有下滑道都相等;有些角度与其他不同。因此,基于它们飞行的飞机,它们可能需要不同的下降率。图2-8显示了基于此进近的各种下滑道所需的下降率与不同地速的对比。
 图2-8 |
在90节时,对于这个3度下滑道,485 fpm的下降率应该让您保持在目标上。
现在轮到您了。如果您在跟踪航向道时遇到困难,请看前方的跑道并在视觉上与它对齐。观察在看实际跑道时保持恒定航向有多容易。为什么更容易?因为您从一个"机头前方"的图像中获得了俯仰、坡度和对齐信息。当您无法看外面时,需要经过训练的仪表扫描才能从三个不同的仪表中获取相同的信息:分别是AI、HI和ILS显示器。
几个重要的秘密
现在您对如何飞行ILS进近有了基本的了解。所以这里是专业人士知道的:首先,最重要的是要径向扫描的仪表是HI和VSI。没有必要每次都径向扫描空速指示器或ILS显示器。事实上,您可能将空速指示器的径向扫描限制为每10次HI和VSI径向扫描一次。您也可以将ILS显示器的径向扫描减少到每三次HI和VSI扫描一次。当然,您偶尔也想在时间允许的情况下查看高度表、转速表和其他各种仪表。一旦您找到了允许您跟踪ILS的航向和下降率,您必须精确地飞行这些值,直到您有理由改变它们。我的意思是精确:优秀的仪表飞行员可以将航向保持到单一度,将下降率保持在正负25 fpm以内。老实说!但这确实需要大量练习。
在湍流中,您的航向和VSI指示很容易上下跳动。在这些情况下,最好飞行平均值。通过更多地依赖AI来进行俯仰和坡度控制来做到这一点。找到允许近似所需下降率的俯仰。保持这个俯仰并在AI上保持机翼水平。
此外,在飞行模拟器时,有时需要在操纵杆上做小的但急促的动作。与实际飞机不同,您无法感知飞行控制上的压力变化。这阻止您预测姿态变化。此外,飞机有方向舵,有助于微调飞机的方向控制。您的模拟器硬件可能没有方向舵可用。在这种情况下,有时需要在操纵杆上做小的急促动作以保持飞机在精确的姿态。如果您有方向舵踏板或方向舵操纵杆,请保持动作平滑!
航向道上的风修正
我回想起我第一次告诉爸爸作为青少年我需要一些空间的时候。他把我锁在门外说:"现在你有了你需要的所有空间。"在那个精确的时刻,我理解了反馈的力量。反馈改变了我的行为,我知道它也会改变您的行为,特别是在飞行航向道方面。
当您第一次开始飞行ILS时,将飞机朝向航向道方向。在奥克兰的情况下,航向道方向是294度。飞行294度,并观察指针的移动。您希望以航向道指针移动的形式获得反馈。特别是,您想知道当您保持294度时指针移动的方向和幅度。
航向道指针的移动告诉您两件事:风向和风速(通过指针移动的速度确定)。一旦指针从其中心位置移动(使用一格水平偏转),使用5到10度的截获角(IA)重新居中。截获角越小,过度修正的可能性就越小。当然,如果您使用10度截获角而指针没有移回中心或移得更远,那么需要更大的截获角。您也知道一旦您重新建立在航向道上,至少需要10度的风修正角。
一旦航向道指针居中,应用小的风修正。根据您对风的最佳估计,尝试1度、5度或10度的风修正角(WCA)。建立WCA后,观察航向道指针。如果它回到中心,您知道WCA是WCA和航向道方向之间的角度。
例如,当在奥克兰截获航向道时,您飞行294度。几秒钟后,航向道指针开始向左移动。您飞行航向道294度左侧10度的航向,或IA为284度,以重新截获指针。当指针重新居中时,您在294度左侧应用5度的WCA(289度)。如果这个WCA有效,指针将保持居中。如果不行,重复使用较小的航向变化重新居中指针的过程。这种技术被称为括号法,它是所有专业飞行员使用的技术(稍作修改)来居中VOR和航向道指针。
练习这种技术肯定会节省您在以后飞行中的尴尬。您最不想看到的就是航向道指针撞击仪表箱。那时乘客开始问那些烦人的小问题,比如:"嘿,那咔嗒声是什么?你打开转向灯了吗, Bud?那是定时炸弹还是什么?"
现在,点击立即飞行此课程链接来练习您刚学到的关于ILS进近的知识。您会玩得很开心的——相信我!